Sistemas de ecuaciones
Este método es un algoritmo que utiliza operaciones elementales de fila para transformar la matriz aumentada de un sistema en su forma escalonada reducida por filas.
1. Operaciones Elementales de Fila
Sección titulada «1. Operaciones Elementales de Fila»Son las únicas acciones permitidas para manipular la matriz sin cambiar la solución del sistema:
- Intercambiar dos filas entre sí ().
- Multiplicar una fila por un número real distinto de cero ().
- Sumar a una fila un múltiplo de otra ().
2. Objetivo: La Matriz Identidad
Sección titulada «2. Objetivo: La Matriz Identidad»Buscamos que la matriz de coeficientes se convierta en la identidad (unos en la diagonal, ceros en el resto): Aquí, son los valores de las incógnitas.
3. Ejemplo Paso a Paso
Sección titulada «3. Ejemplo Paso a Paso»Resolver el sistema:
Paso 1: Matriz aumentada
Paso 2: Crear el primer pivote (1 en la posición [1,1]) Intercambiamos y para tener el 1 arriba fácilmente:
Paso 3: Hacer cero debajo del pivote A la Fila 2 le restamos 3 veces la Fila 1 ():
Paso 4: Crear el segundo pivote (1 en la posición [2,2]) Dividimos la Fila 2 por 5 ():
Paso 5: Hacer cero por encima del pivote (Eliminación de Jordan) A la Fila 1 le sumamos la Fila 2 ():
Resultado Final:
1. Tipos de Sistemas (Teorema de Rouché-Frobenius)
Sección titulada «1. Tipos de Sistemas (Teorema de Rouché-Frobenius)»Basándonos en el número de soluciones, clasificamos los sistemas así:
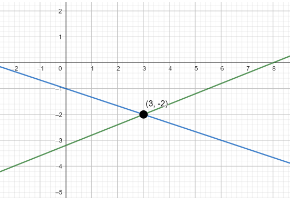
A. Sistema Compatible Determinado (SCD)
Sección titulada «A. Sistema Compatible Determinado (SCD)»-
Solución: Única (un solo punto de intersección).
-
En la matriz: Obtienes una identidad clara (ej. ).
-
Gráficamente: Las rectas o planos se cruzan en un solo punto.
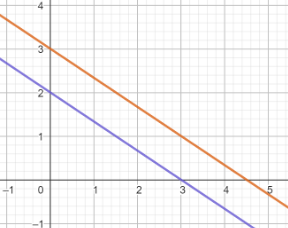
B. Sistema Compatible Indeterminado (SCI)
Sección titulada «B. Sistema Compatible Indeterminado (SCI)»-
Solución: Infinitas soluciones.
-
En la matriz: Aparece una fila completa de ceros (). Esto significa que una ecuación es redundante.
-
Gráficamente: Las rectas o planos son coincidentes (están uno encima del otro).
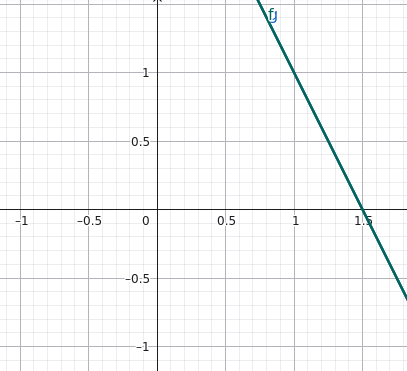
C. Sistema Incompatible (SI)
Sección titulada «C. Sistema Incompatible (SI)»-
Solución: No tiene solución.
-
En la matriz: Llegas a una contradicción del tipo (donde ).
-
Gráficamente: Las rectas o planos son paralelos y nunca se tocan.
2. Independencia y Dependencia Lineal
Sección titulada «2. Independencia y Dependencia Lineal»Este concepto analiza si las ecuaciones (o vectores) aportan información nueva o si son “copias” de otras.
Linealmente Independientes (L.I.)
Sección titulada «Linealmente Independientes (L.I.)»Un conjunto de filas/vectores es L.I. si ninguno puede escribirse como combinación de los demás.
- Relación con el sistema: Un SCD tiene todas sus filas Linealmente Independientes.
- Determinante: Si los vectores son L.I., el determinante de la matriz es distinto de cero ().
Linealmente Dependientes (L.D.)
Sección titulada «Linealmente Dependientes (L.D.)»Un conjunto es L.D. si al menos una fila es combinación lineal de las otras (ej. una fila es el doble de otra, o la suma de las otras dos).
- Relación con el sistema: Los SCI y los SI contienen filas Linealmente Dependientes.
- Determinante: Si hay dependencia lineal, el determinante es igual a cero ().
[Image illustrating linearly independent vs linearly dependent vectors in 2D and 3D space]
3. Resumen Técnico
Sección titulada «3. Resumen Técnico»| Tipo de Sistema | Soluciones | Rango de A vs A* | Estado de las filas |
|---|---|---|---|
| SCD | 1 | Iguales = n° incógnitas | Linealmente Independientes |
| SCI | Iguales < n° incógnitas | Linealmente Dependientes | |
| SI | 0 | Rango A < Rango A* | Contradicción matemática |
4. Ejemplo de Identificación Rápida
Sección titulada «4. Ejemplo de Identificación Rápida»Si tienes el sistema:
Notas que la ecuación (2) es exactamente el doble de la (1).
- Son Linealmente Dependientes.
- El determinante será .
- Es un Sistema Compatible Indeterminado (infinitas soluciones).